 ADS-B PocketQube is taking shape
ADS-B PocketQube is taking shape
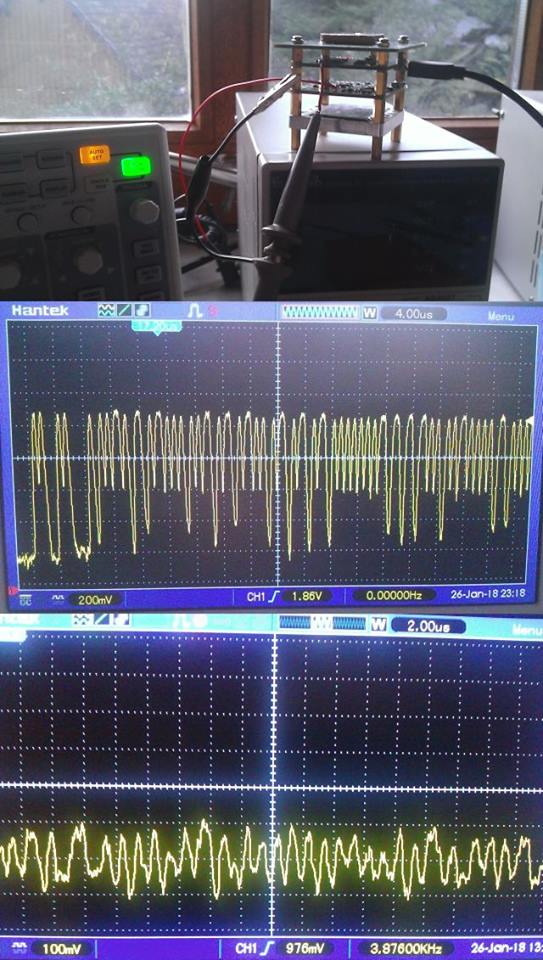
Here is a running ADS-B test on the engineering model inner structure of the satellite.
The signal reception is great, getting more than 44dB above the noisefloor (upper graph, 19.9mV/dB), a rare situation though, because it´s not much nearby traffic here.
Lower graph shows a weak signal, barely above noise at -92dBm. The bits still look decodable – I´ll continue optimizing. It´s a bit of a challenge.
In average, there are many many signals per second with 10-20dB over noisefloor with no visible planes.

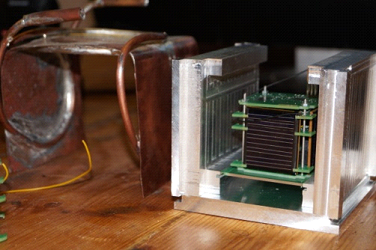
Solar Panel Test
The test of our new solar panels was successful. The power output is 6 times the value given in the datasheet.

Milling the Shakerbox
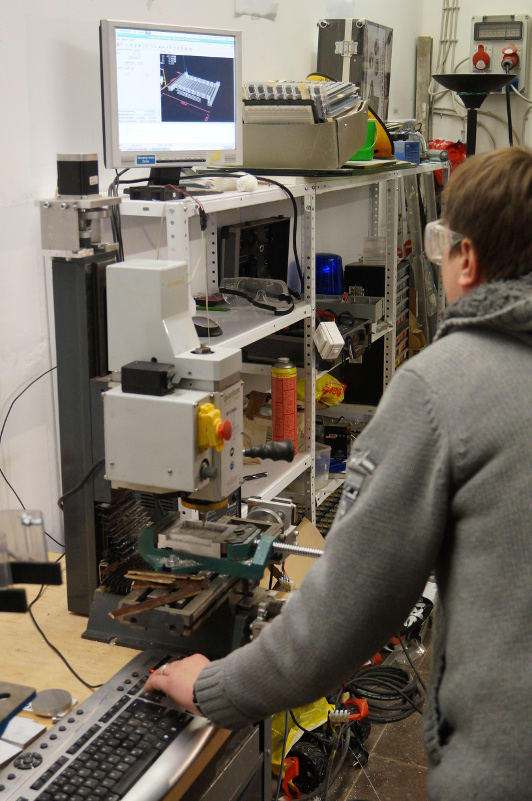
Milling the Shakerbox. Thanx to Jacek Wisniowski for technical support.
A development model of WREN in the shakerbox frame
SSTV abilty added to the WREN PocketQub
 This is the first picture transmitted from the satellite in Martin-1 SSTV format. Thanx for this lovely support to my sweetheart Rong
This is the first picture transmitted from the satellite in Martin-1 SSTV format. Thanx for this lovely support to my sweetheart Rong
Find out more about SSTV
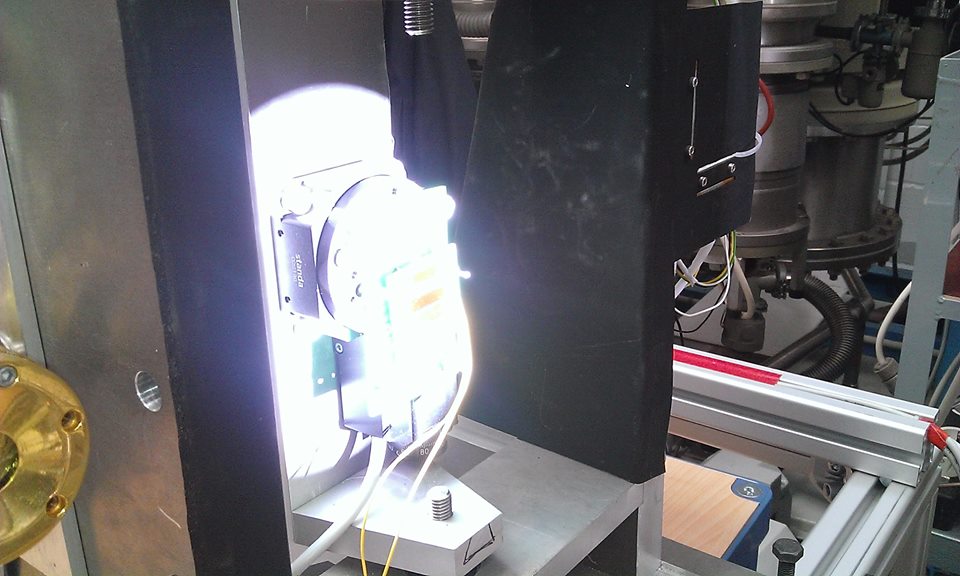
8-Channel Plasma Thruster Vacuum test
Succesful test of my 8-Channel pulsed plasma thruster. Let´s see how it performs in orbit.

Paul Kocyla at the vacuum test chamber of the FH-Aachen University